Ongoing Projects

aiko.
aiko. (previously agile.) is a MedTech startup working to enable real-time voice translation in a medical setting. We were one of the winners of UofT Entrepreneurship Hatchery's summer incubator program NEST, and are currently working on pilot studies with multiple long-term care homes in Toronto.
Hatchery profile aiko. in the news!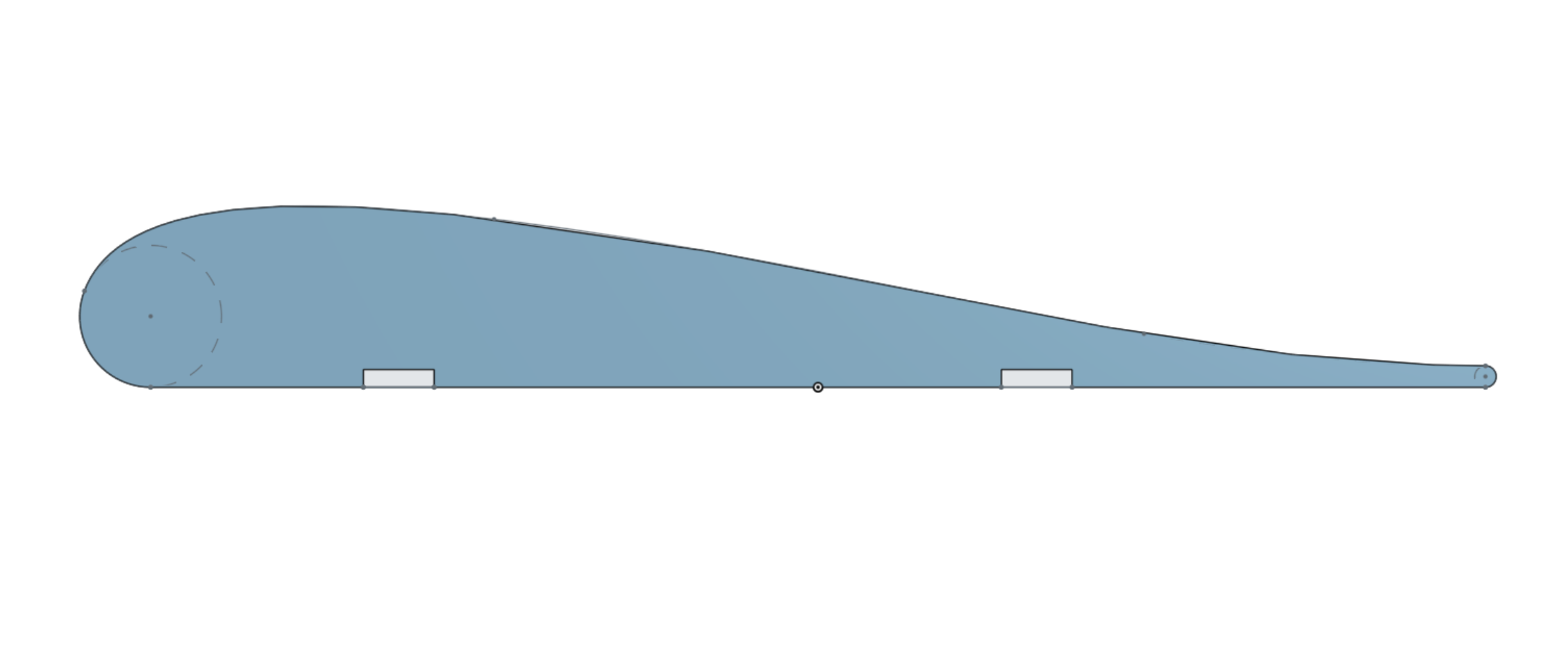
Plane n' Simple ✈️
A couple of friends learning aerodynamics, embedded electronics, and control systems by designing and building our own remote-controlled aircraft. Currently in detail design of:
-
PNS Hydrogen2m wingspan fixed-wing plane with custom foam airframe and off-the-shelf electronics
-
PNS Neutrinoan STM32 powered, low-cost micro drone under 250g
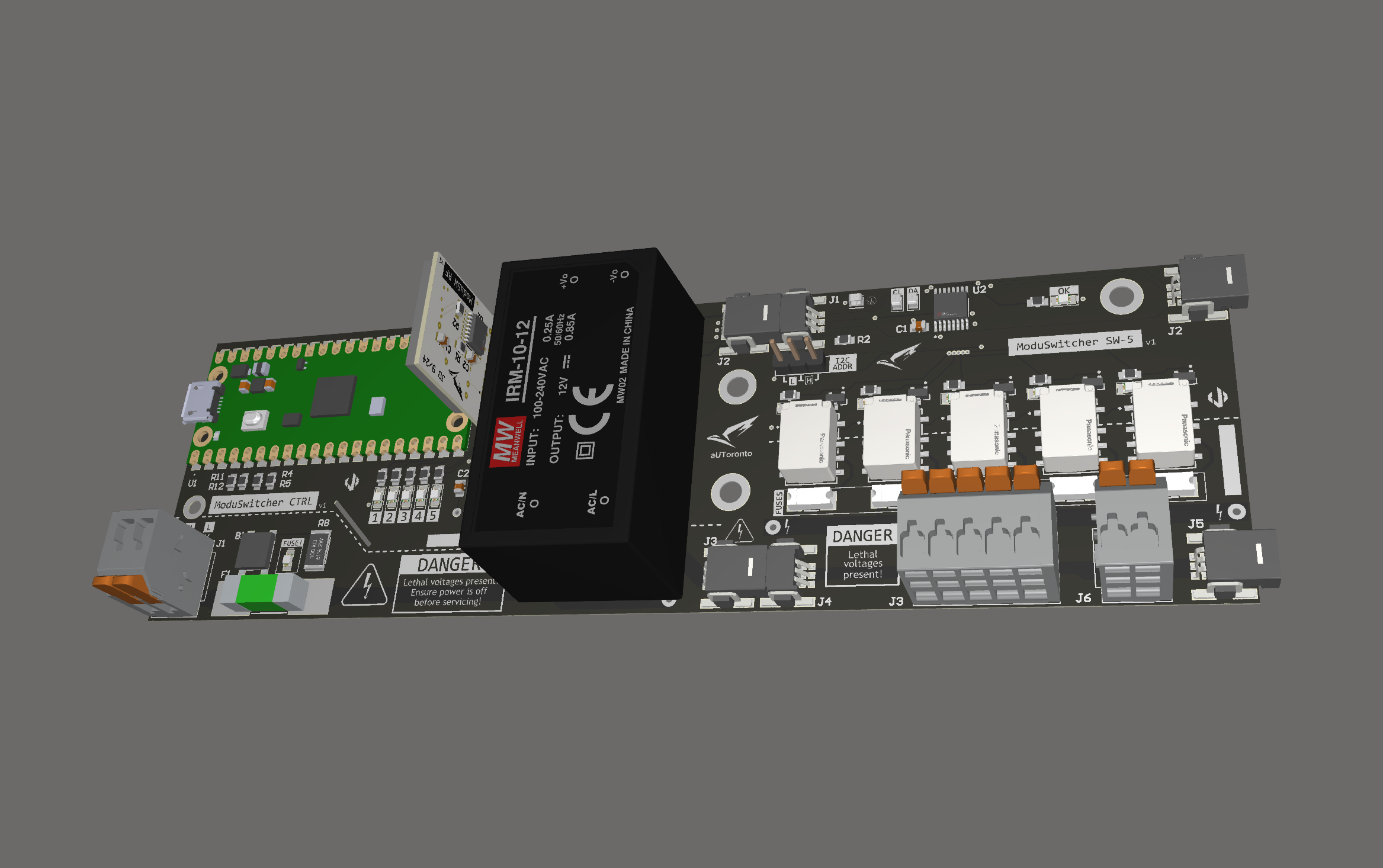
Traffic Light Controller
Allows wireless control of multiple traffic lights (of up to 5 heads each) over up to 500m line-of-sight via mesh LoRA
and a custom-built communication protocol.
Designed for aUToronto, University of Toronto's award-winning self-driving car team, where I serve as
Systems Technical Director.
Completed Projects
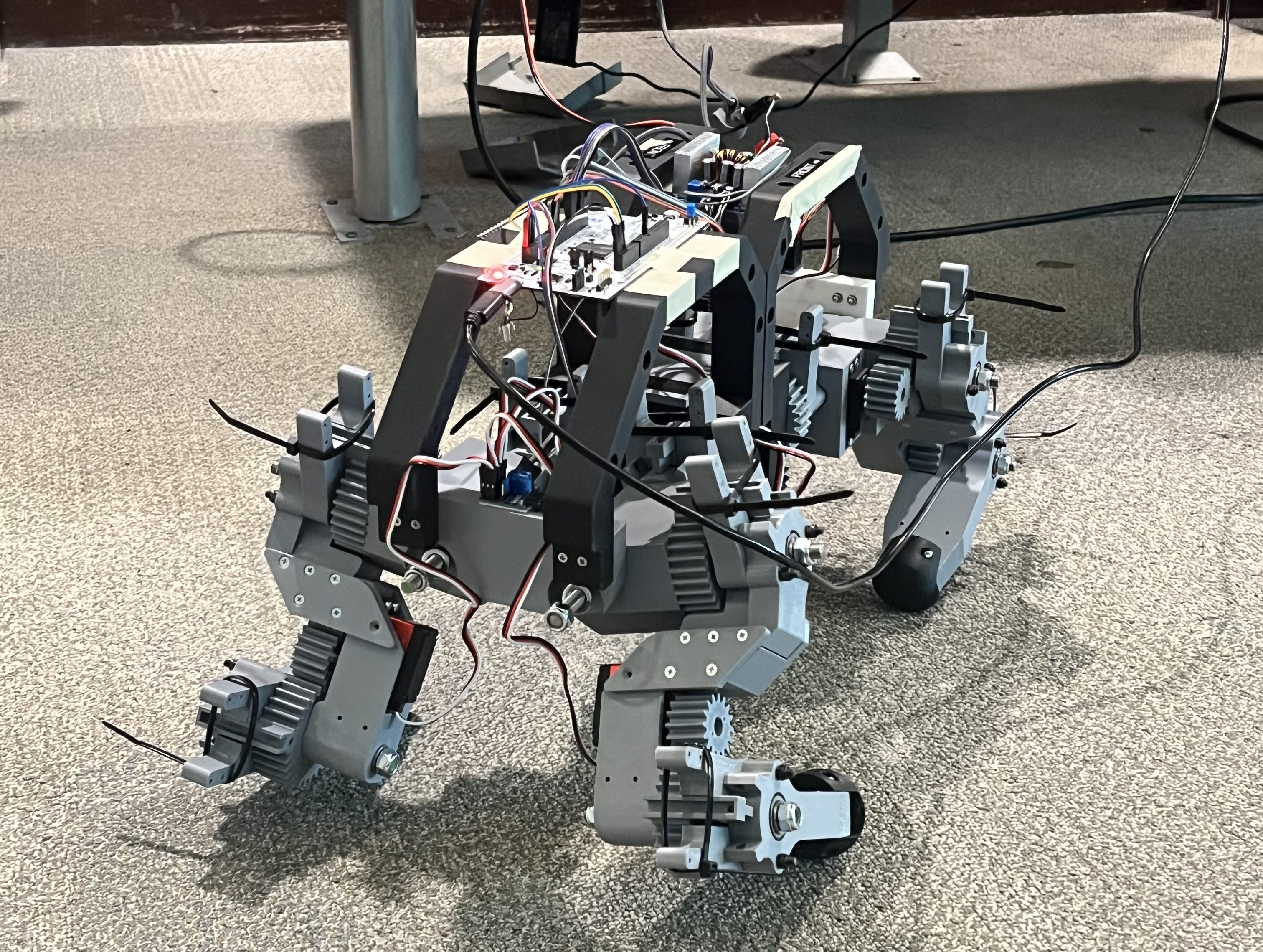
RoboDog
A small-sized robot dog (approx. ankle height) based on the CAD open-sourced by James Bruton, with
from-scratch inverse kinematics and addition of motion sensitive (IMU) controller.
Exploring my budding interests in control systems and bio-inspired robotics with a friend!
Supported by a #RisingYouth grant from TakingITGlobal/Government of Canada.
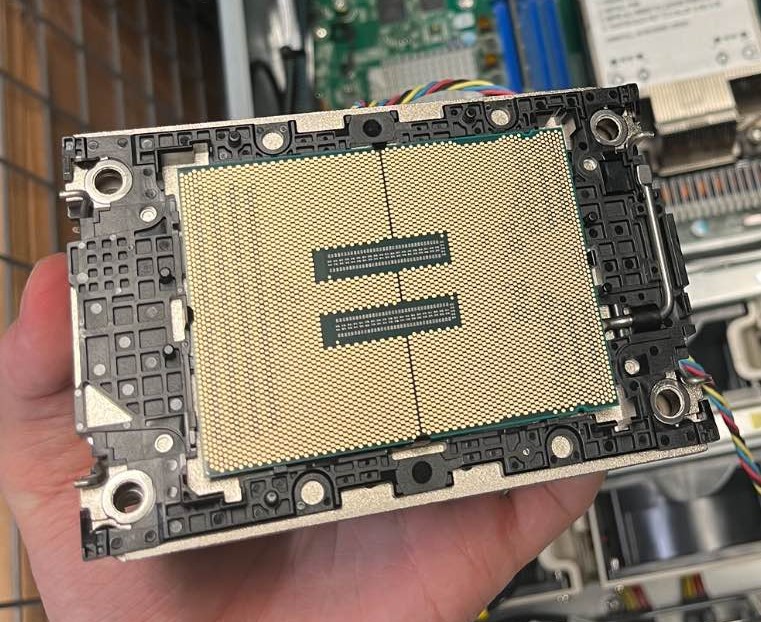
Intel TDX Side-Channel Attacks
As part of summer research with Prof. Lie's Toronto Systems Security Lab, I explored cache side-channel
vulnerabilities in Intel's latest-gen confidential computing technology for CPUs: Intel TDX.
Funded by an NSERC Undergraduate Student Research Award.
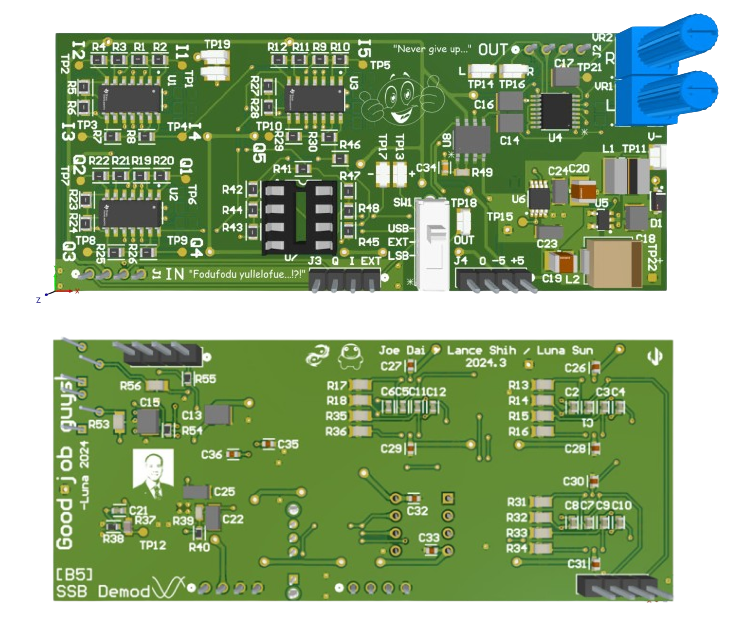
SSB Demodulator
Built a single sideband demoulator as part of a team-based hardware design course, to be integrated with other modules to form a software-defined radio transceiver in the 8-16 MHz (HF) band.
GitHub
FlightPGA
Almost completed retro 3D flight simulator in Verilog on the DE1-SoC (w/ Altera Cyclone V FPGA).
Included fully pipelined vector/matrix operations and SDRAM based VRAM.
Unfortunately, slow VRAM performance was too problematic, see FlightPGA2 for its successor!
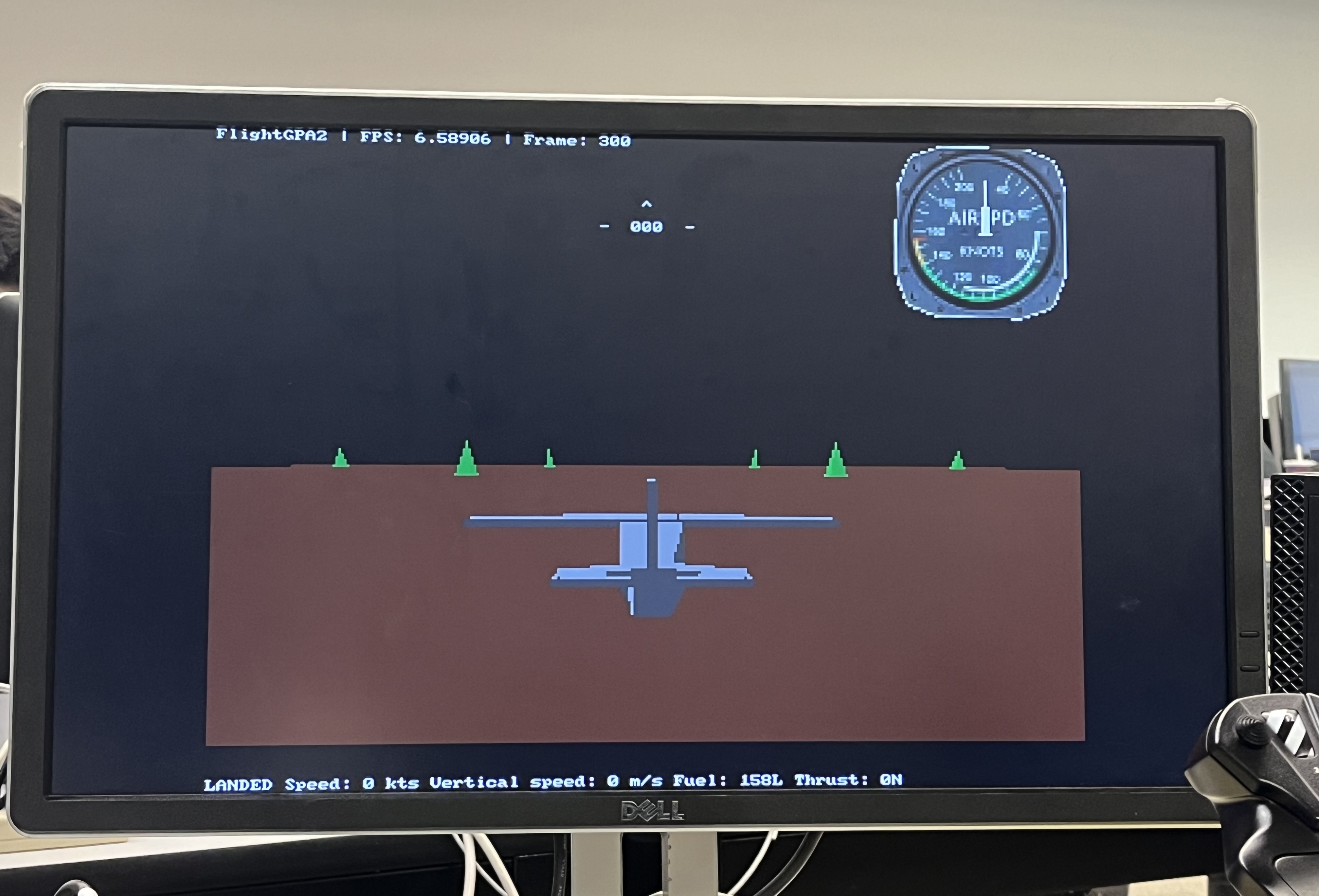
FlightPGA2
Second attempt at building a 3D flight simulator from scratch on the DE1-SoC, this time in C++ on a Nios II soft-core running on the Altera Cyclone V FPGA.
Even interfaces with a HOTAS joystick and includes environmental sound effects!
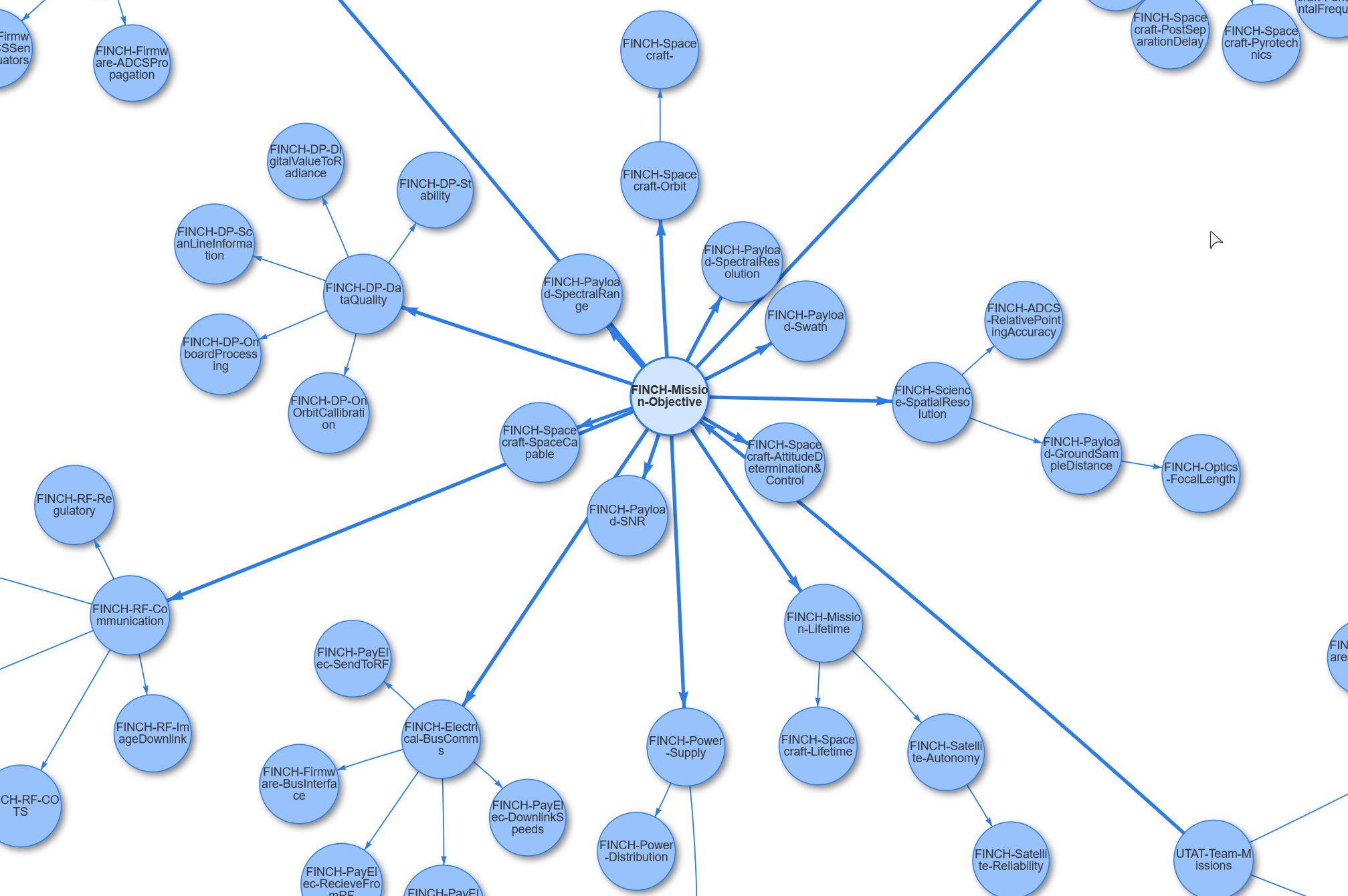
TreeVisualizer
An open-source tree-like visualizer for Notion databases, primarily for visualizing requirements at UTAT Space Systems design team, where we are building two 3U cube-sats (HERON launched Q3 2023, FINCH launching soon).
GitHub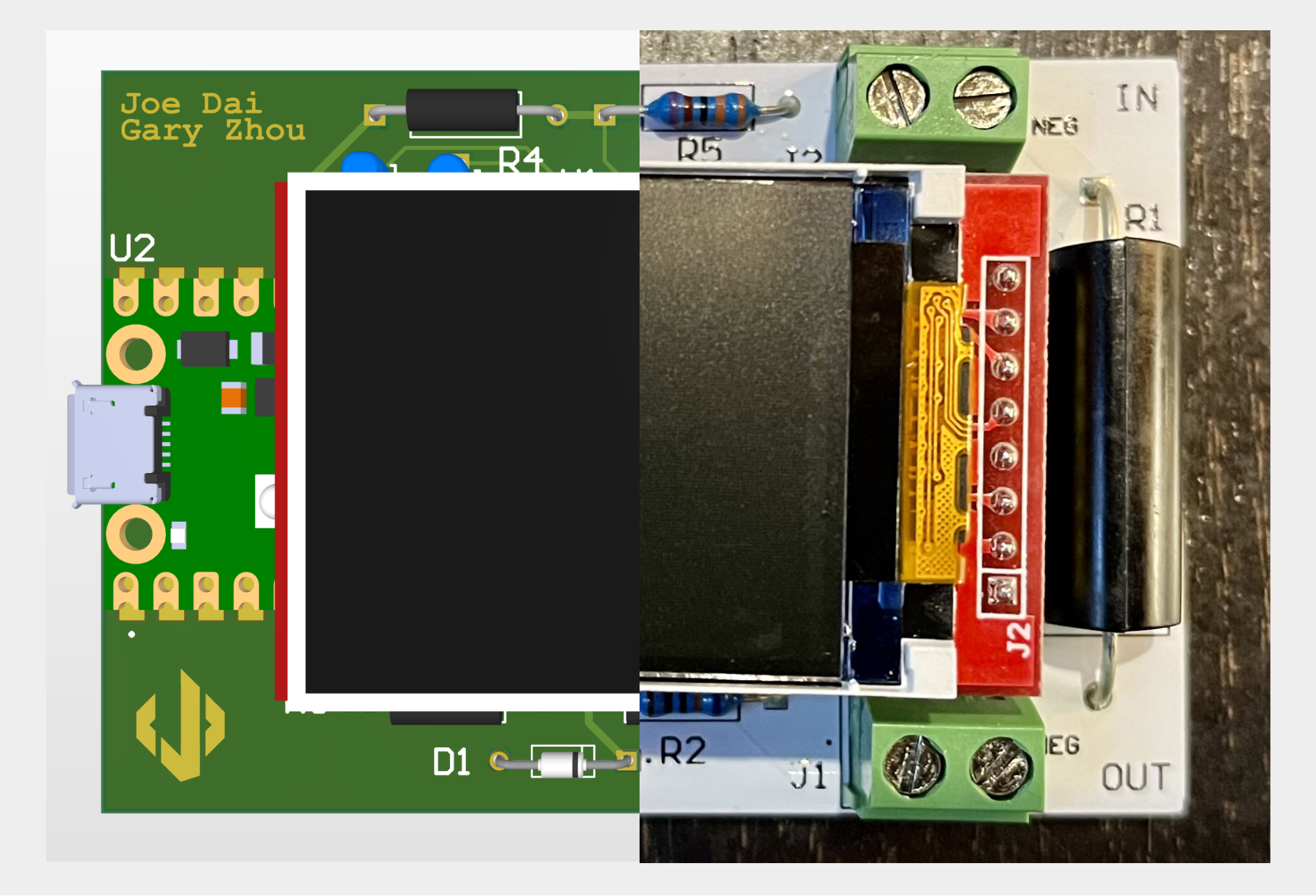
PicoPowerMeter
A DC voltage/current/power/energy meter using the Raspberry Pi Pico, aiming to be accurate to ± 0.1% @ 0-24V and 0-1.5A.
GitHub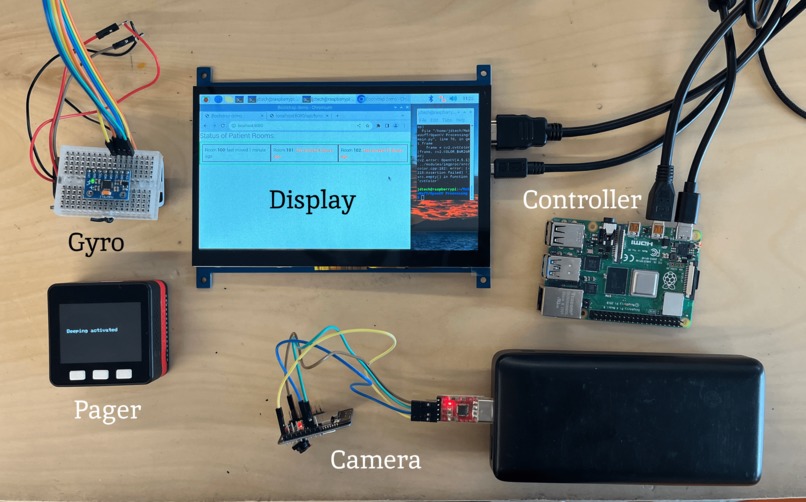
R.A.P.I.D.
A multi-device approach to managing remote patient monitoring (RPM) using COTS hardware powered by OpenCV to prevent bed sores. [Hackathon Project]: MakeUofT 2023.
GitHub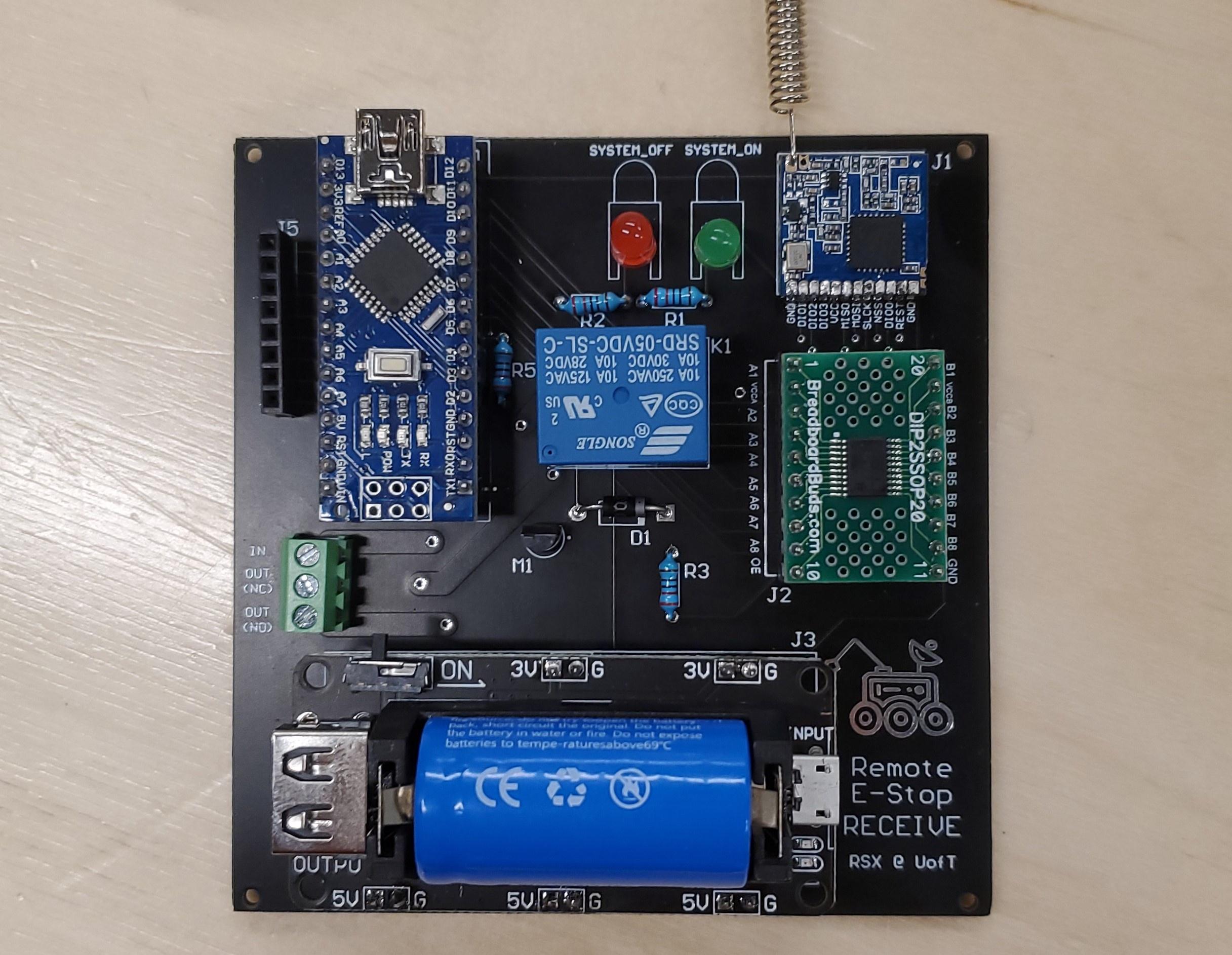
Rover Remote E-Stop
LoRaWAN-based long range (1 km+) wireless emergency stop to increase safety for a competition rover. Built at Robotics for Space Exploration (RSX) design team.
GitHub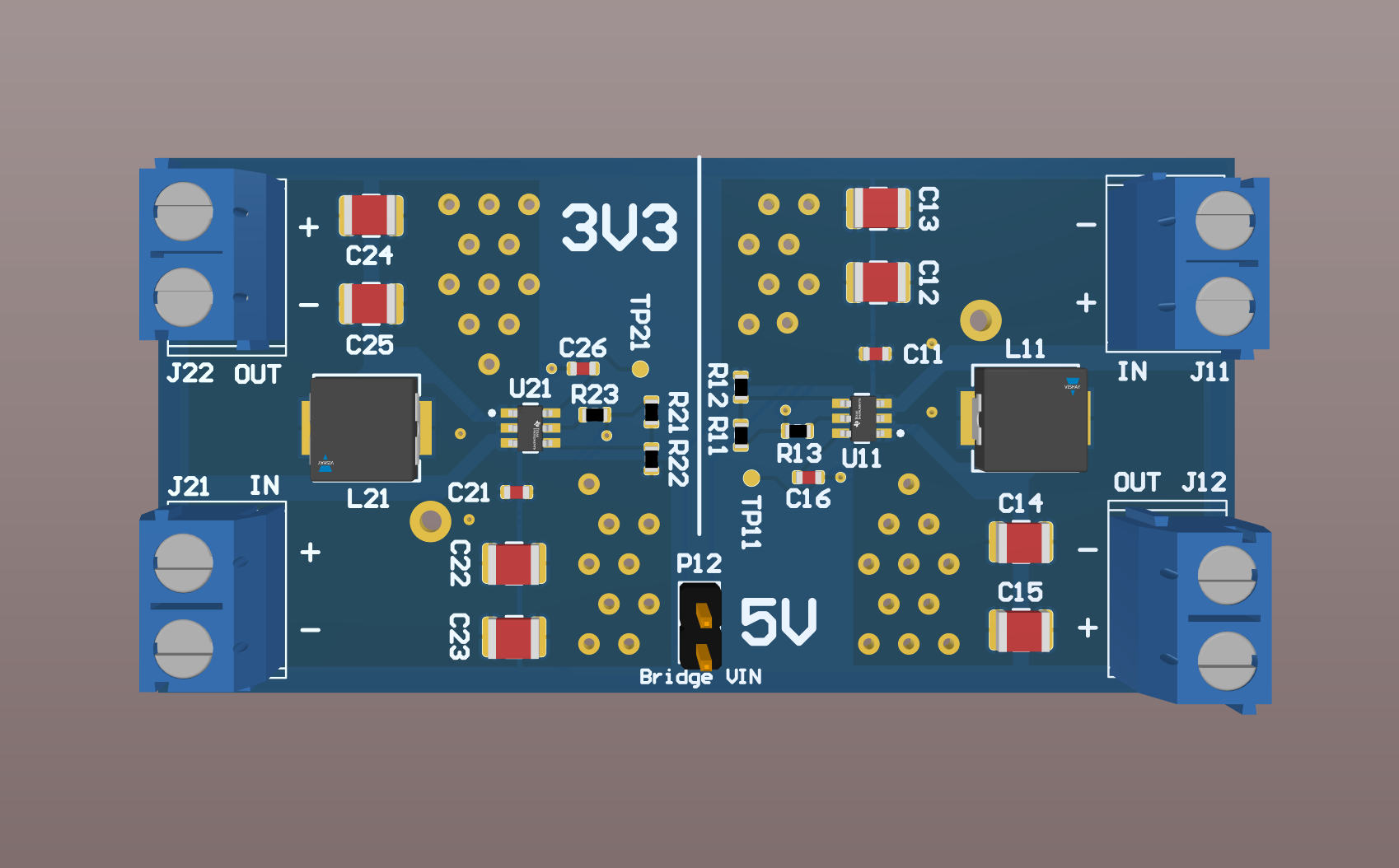
SimpleBuck
Module to evaluate the suitability of TI's TPS565201 IC for UTAT Space Systems' FINCH cube-sat. Converts 17V to 3.3V and 5V.